
Profile
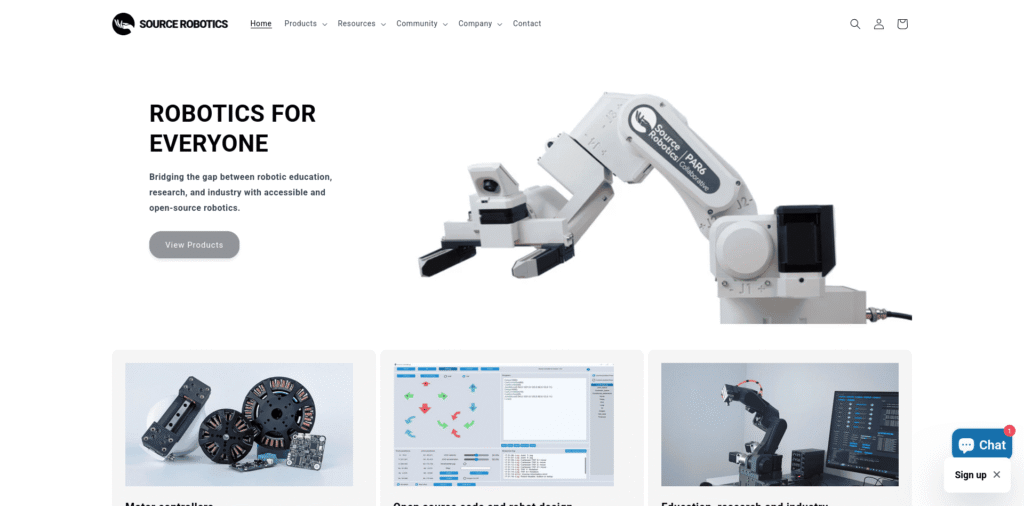
Source Robotics is a European robotics company (based in Croatia) focused on making advanced robotics accessible through open-source hardware and software. The company bridges education, research, and industry by offering affordable, well-documented robotic components and complete systems, particularly the PAROL6 robotic arm. Their mission is to democratize robotics by providing high-quality, hackable platforms with full open-source designs, BOMs (Bill of Materials), and software.
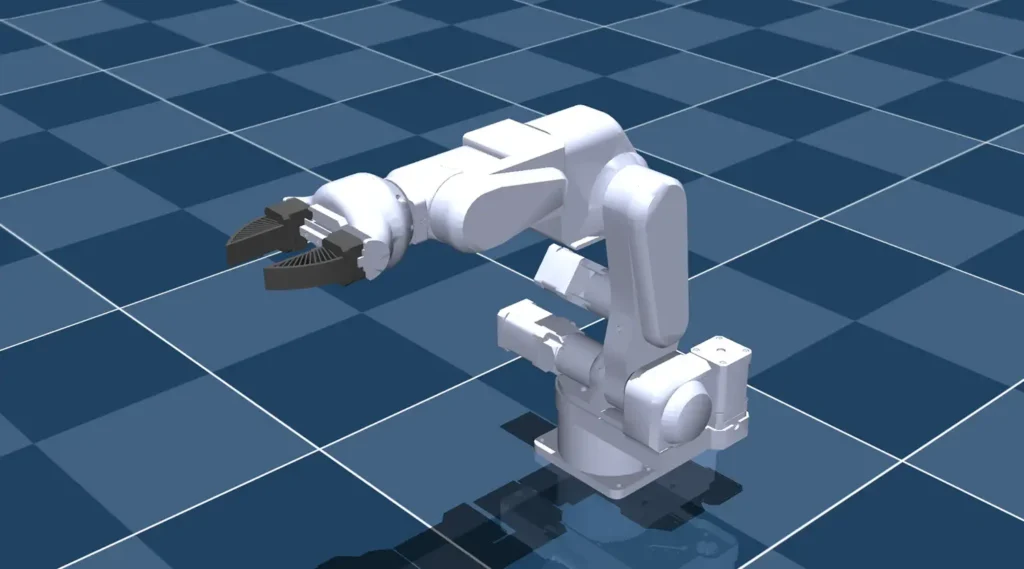
The company emphasizes transparency, community contribution, and practical usability. All major products include detailed documentation, simulation files (URDF, MJCF, USD), and support for ROS and modern AI frameworks.
Key robot-based products include:
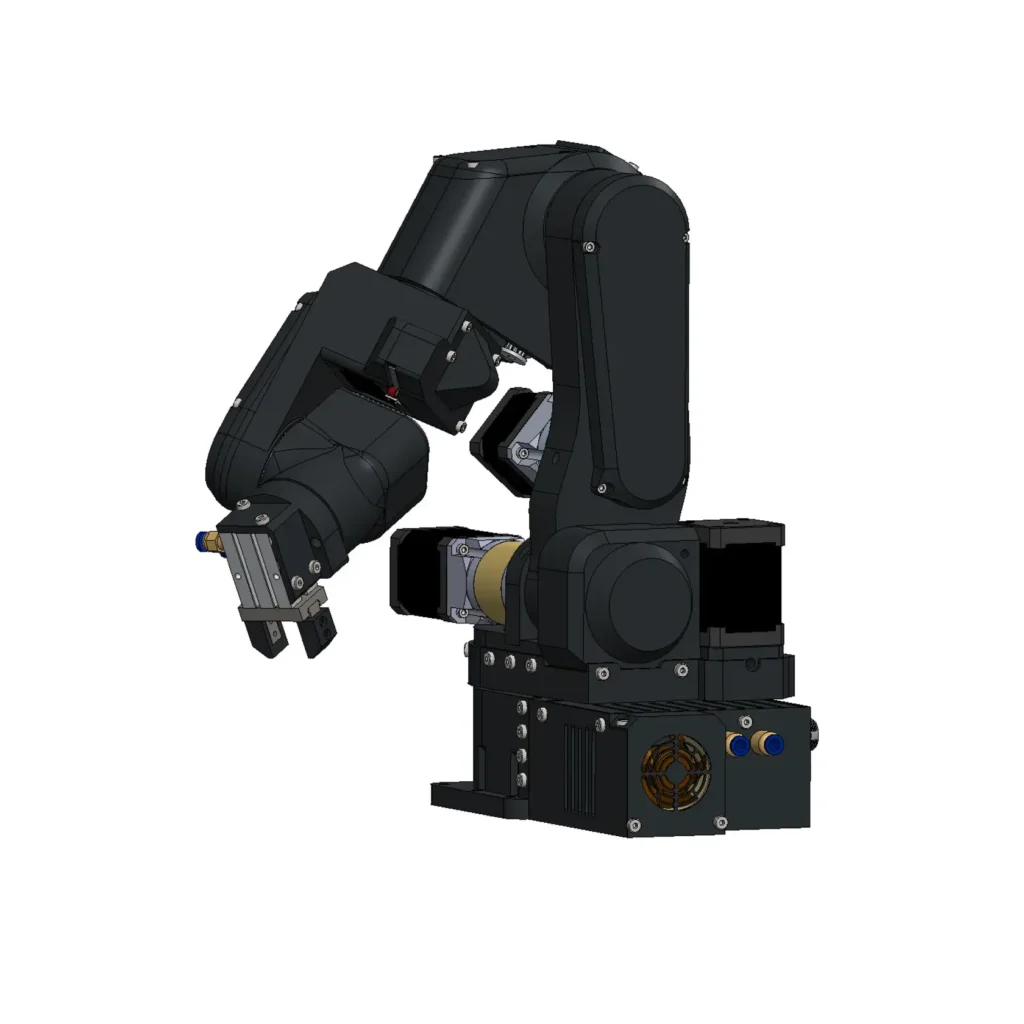
- PAROL6 Robotic Arm: A 6-axis desktop robotic arm designed for education, research, and light industrial use. It features a modern intuitive user interface, jog control, telemetry, scripting, and strong performance for its size. Available as a fully assembled unit, partial kit, or full open-source build-your-own version. It supports advanced control, force feedback experiments, and AI/ML integration.
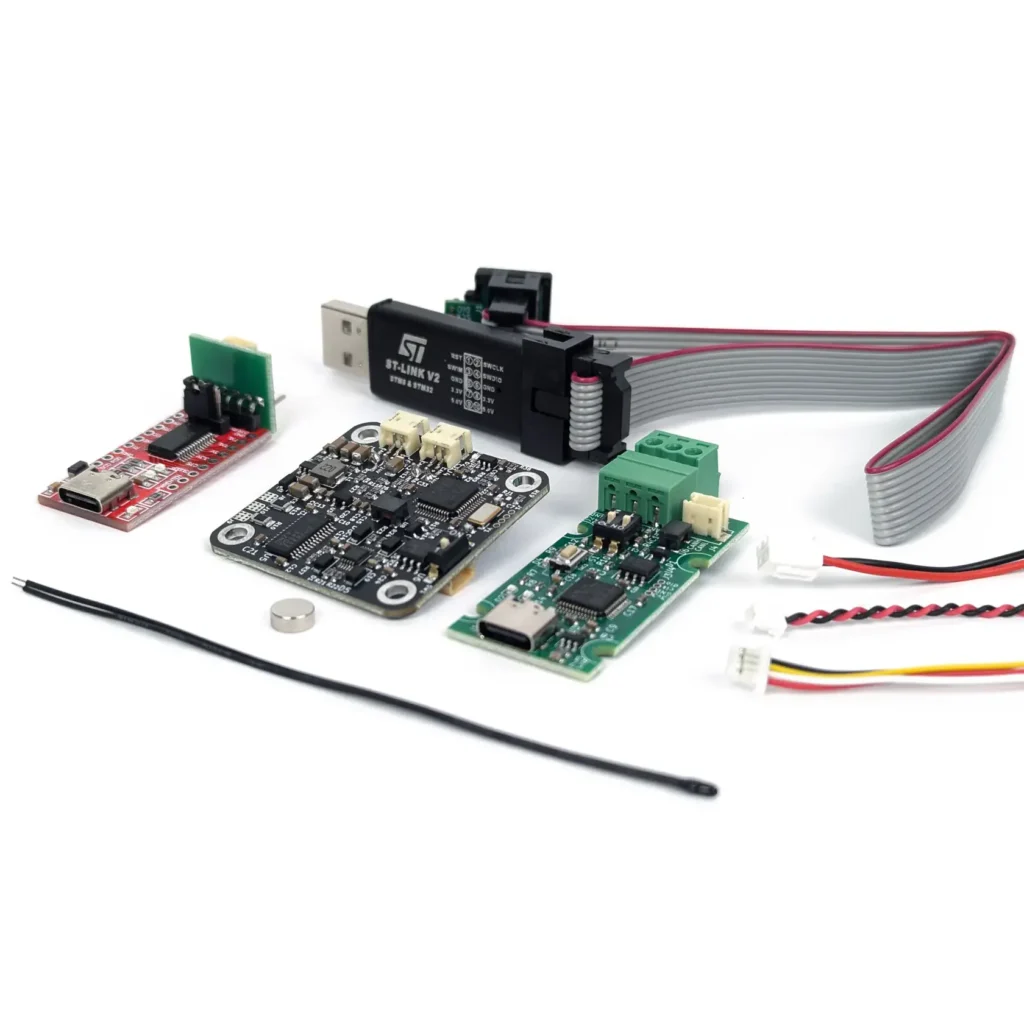
- Spectral Micro BLDC Controller: A compact, high-performance brushless motor controller ideal for custom robots, quadrupeds, arms, and other projects requiring precise control.
- STEPFOC Stepper Controller: Advanced Field-Oriented Control (FOC) drivers that turn standard stepper motors into high-performance robotic servos with precise force/torque control.
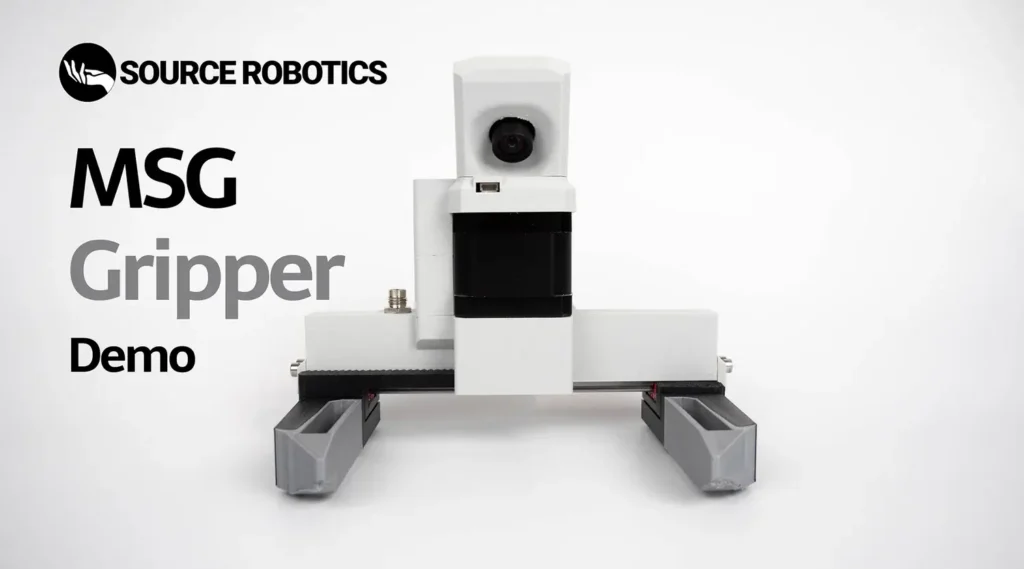
- Grippers: Including the SSG-48 Adaptive Electric Gripper and MSG Compliant AI Gripper, designed for versatile and intelligent grasping with camera integration and force control.
- Control Boards and Accessories: PAROL6 Control Board, starter kits, screw kits, and STEP files for customization.
Source Robotics targets universities, researchers, makers, and small industrial users looking for capable yet affordable open-source solutions. The company actively maintains a blog with technical content on topics like admittance control, simulation formats, and gripper development.



Map
Sorry, no records were found. Please adjust your search criteria and try again.
Sorry, unable to load the Maps API.

