
Profile
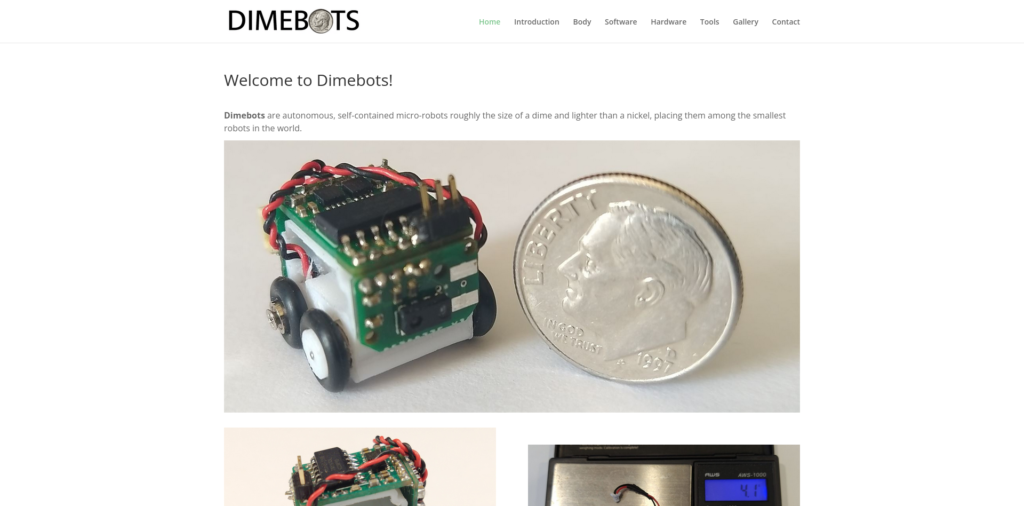
DimeBots is a project focused on developing some of the world’s smallest autonomous, self-contained micro-robots created by Dr. Chris Stemple. The name derives from their diminutive size—roughly equivalent to a U.S. dime (about 18 mm in diameter)—and extremely low weight of less than a nickel (approximately 5 grams). Unlike many other micro-robots that depend on external power sources such as magnetic fields, vibration, light, sound, or lasers for actuation, DimeBots are fully independent, carrying their own power supply, processing, and drive systems to enable true onboard autonomy.
The project emphasizes accessibility and simplicity in design, making it feasible for hobbyists, makers, and educators to build these tiny machines using readily available components and standard desktop 3D printing. The official website at www.dimebots.com serves primarily as an introduction to the concept, highlighting the robots’ scale with visual comparisons to a dime. Additional documentation and resources appear on platforms like Hackaday.io and GitHub under the DimeBots organization, where open-source files support the community.
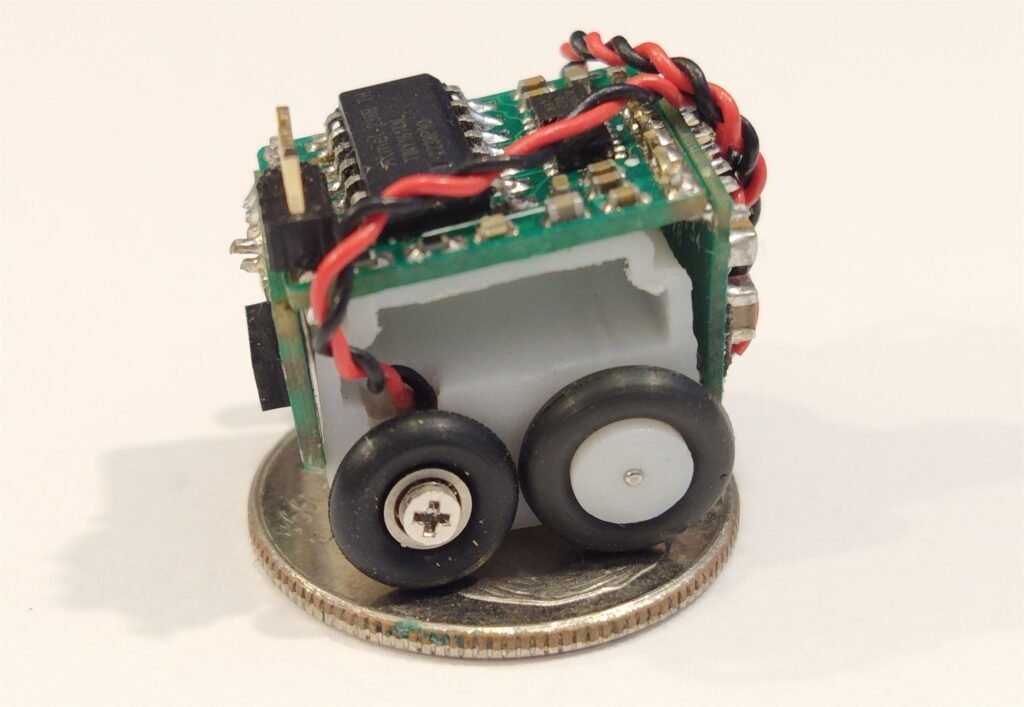
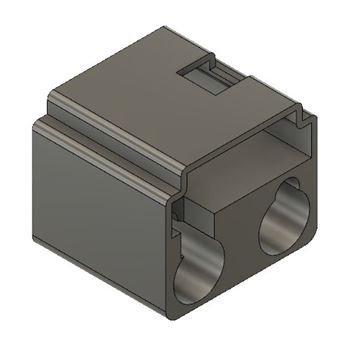
Hardware Design forms the core of DimeBots‘ innovation in miniaturization. Each robot features a 3D-printed body made from PLA (polylactic acid) plastic, chosen for its low cost, ease of printing, renewability, and biodegradability. Traction comes from modified #005 O-rings used as tires, sanded for better grip. Power and control center on a compact Microchip ATtiny1614 microcontroller in a 14-pin SOIC package. This MCU offers useful peripherals including multiple PWM channels for motor control, UART, I²C, and a simple 3-pin UPDI programming interface.
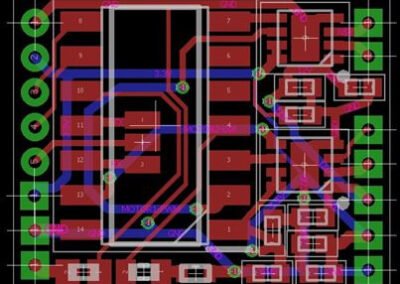
Motion is provided by tiny vibration motors or coreless DC motors (examples include 1.5V–5V units drawing as little as 5–25 mA at various speeds up to 62,000 RPM). A Texas Instruments DRV8837 H-bridge motor driver handles PWM control in a tiny 8-pin package, supporting efficient operation and ultra-low power sleep modes (down to 120 nA). Battery charging likely utilizes a Microchip MCP73831 linear charger. The entire assembly integrates sensors (though specifics vary by build), onboard power (likely a small lithium cell), and the PCB layout designed in Eagle CAD. All components fit into a self-contained chassis without external tethers, representing a significant engineering achievement in power density and integration.
Software and Programming rely on Arduino-compatible firmware written in C++ for the ATtiny1614, using cores from Spence Konde’s megaTinyCore. The GitHub repository (github.com/dimebots) provides Arduino sketches, 3D print files, and PCB designs under an MIT license. This setup allows users to program autonomous behaviors such as obstacle avoidance, light-seeking, or simple swarm-like interactions, leveraging the MCU’s capabilities for real-time control. The open-source nature encourages experimentation, education in embedded systems, and customization for different sensors or behaviors.
DimeBots target educational and hobbyist applications in STEM fields, demonstrating principles of robotics, electronics miniaturization, mechanical design, and embedded programming at an accessible scale and cost. They highlight challenges in micro-robotics, such as balancing power consumption, mechanical reliability, and computational limits in a sub-5-gram package. While not a large commercial enterprise with mass-produced consumer products or a traditional company structure, DimeBots functions as an open hardware initiative that promotes maker culture and inspires further innovation in tiny autonomous systems.
The project stands out for proving that fully self-contained, battery-powered mobility is achievable at dime scale without exotic fabrication. Builders can replicate the robots using common tools—a 3D printer, basic soldering, and an Arduino IDE—lowering barriers compared to academic micro-robot research. As of recent documentation, the project includes galleries of completed units and continues through community contributions on Hackaday and GitHub. Future potential includes expanded sensor suites, improved autonomy algorithms, or swarm behaviors, further pushing the boundaries of accessible micro-robotics.
In summary, DimeBots represents a creative, open-source effort to democratize ultra-small robotics. By combining clever component selection, 3D printing, and straightforward firmware, it delivers functional autonomous robots that challenge perceptions of size limits in self-powered machines. The initiative bridges hobbyist making with advanced robotics concepts, offering hands-on learning opportunities while showcasing efficient engineering at the micro scale.

Map
Sorry, no records were found. Please adjust your search criteria and try again.
Sorry, unable to load the Maps API.
