Profile
Pollen Robotics is a French robotics company (acquired by Hugging Face in 2024) specializing in open-source humanoid robots designed for research, education, and real-world manipulation tasks. The company is best known for developing Reachy, a highly accessible and modular humanoid platform that has gained significant popularity in the global robotics community for its affordability, extensibility, and strong focus on open-source principles.
Pollen Robotics emphasizes transparency, collaboration, and democratization of robotics technology. Their robots are built to interact safely with humans and the physical world, with a strong emphasis on data protection, security, and community-driven development. The company’s vision is to create robots that benefit people and society rather than replacing them, while advancing embodied AI research through open collaboration.
Key robot-based products include:
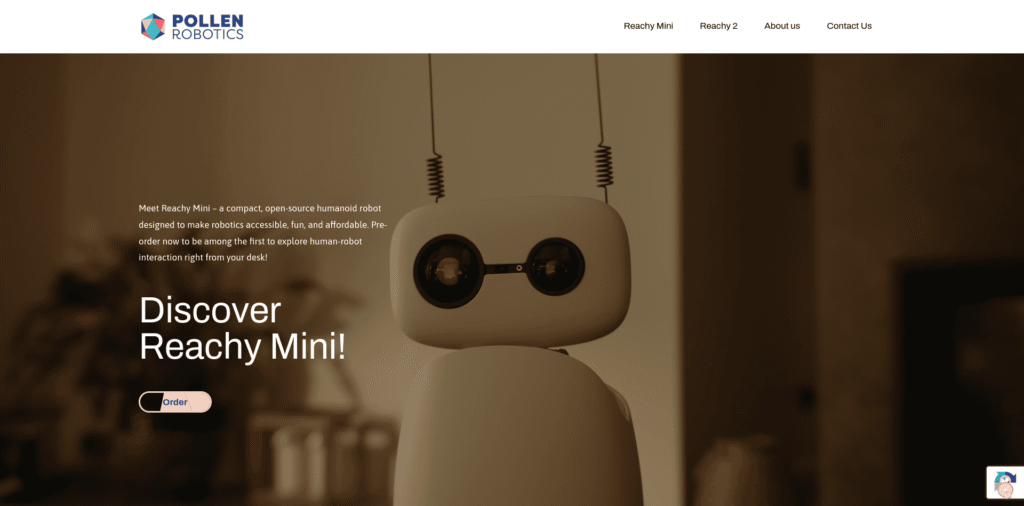
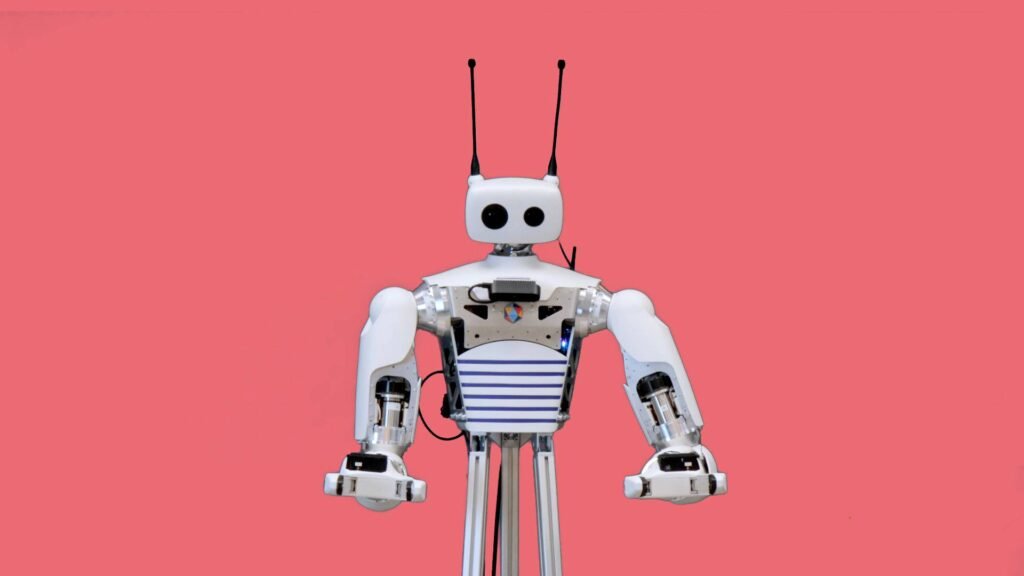
- Reachy: A modular, open-source humanoid robot with expressive design and advanced manipulation capabilities. It features multiple degrees of freedom in the arms and hands, allowing for complex tasks such as object grasping, tool use, and human-like interaction. Reachy is widely used in research labs, universities, and by developers experimenting with AI, computer vision, and reinforcement learning.
- Reachy 2: The latest generation, developed in collaboration with Hugging Face. It is positioned as an open-source household humanoid capable of performing everyday chores and tasks. It builds upon the original Reachy with improved hardware, better dexterity, and enhanced AI integration for real-world applications.
The platforms are fully open-source, with detailed documentation, CAD files, software, and community contributions available on GitHub. This approach allows researchers and developers worldwide to customize, extend, and improve the robots for specific use cases. Pollen Robotics actively encourages community participation through Discord and open-source repositories.



Map
Sorry, no records were found. Please adjust your search criteria and try again.
Sorry, unable to load the Maps API.